Questa è la storia del mio ROV (Remotely Operated Vehicle), cercherò di essere breve. Da anni mi girava per la testa l'idea di scoprire in che stato fosse la presa dell'originaria galleria di by-pass nell'ex-bacino del Vajont, quella a quota 624 s.l.m. sostituita negli anni '80 da una più moderna e nuova presa a quota 635 s.l.m. Un giorno mi trovai alla fiera dell'elettronica di Udine e vidi una piccola telecamera a colori e ad infrarossi con tanto di ricevitore wireless: il prezzo era invitante (20€) e così l'aquistai; era l'inizio di novembre 2010 ed era anche l'inizio del progetto ROV. L'idea era quella di inserire la telecamera in un contenitore stagno, motorizzarlo ed alimentarlo tramite un cavo LAN che mi avrebbe anche fatto pervenire le immagini alla mia ex-telecamera JVC mini DV, guasta nel sensore CCD ma funzionante come registrazione con un ingresso AV esterno. Non avevo un progetto ben definito a tavolino e così improvvisai molto, forse troppo. Con della racorderia in PVC da 80 mm per scarichi domestici, una lastra in Lexan, qualche guarnizione OR e del collante Tangit realizzai il contenitore stagno per la telecamera, ovvero il corpo principale del ROV. All'interno del corpo predisposi l'allogiamento per due batterie da 9 volt che avrebbero alimentato la telecamera con un'autonomia sufficiente. Pensai a 4 thrusters per muovere il ROV, due orizzontali per l'avanzamento e la direzione e due verticali per l'immersione e l'emmersione. Acquistai in una modellistica 4 motori a 6 volt CC e 4 eliche tripala: una volta in mano il tutto mi pareva sottodimensionato, ma proseguii con la realizzazione. Con della banda zincata e dei rivetti realizzai una sorta di struttura di collegamento tra il corpo principale ed i motori ed una slitta inferiore per eventuali contatti con il fondo del lago.
Realizzai tutti i cablaggi a bordo ROV con cavi che avevo in casa, come molto altro materiale impiegato. Acquistai qualche altro componente per la realizzazione della pulsantiera di comando, che all'interno prevedeva 8 batteria stilo da 1,5 v per l'alimentazione dei motori. Il cavo LAN mi è stato procurato dall'amico Elvis, 20 metri più che sufficienti per un'immersione massima prevista di 11 metri. La stessa lunghezza è stata impiegata nel cavo AV da 75 ohm per il collegamento dalla minicam IR alla videocamera JVC monitor/registrazione.


Ero entusiasta del mio ROV, avevo coinvolto nella "missione" anche Elvis e Francesco, i due amici collaboratori di progettodighe.it, anche perchè il giorno del varo non potevo essere solo al Vajont. Entusiasta fino alla sera delle prove tecniche domestiche, svoltesi nella vasca da bagno: purtroppo ciò che sospettavo sin dall'inizio si avverò, ovvero motori ed eliche sottodimensionati. A 'corrente zero', cioè in acqua calma nella vasca da bagno, i propulsori riuscivano a malapena a spostare il ROV e parte dei cavi ombelicali che esso si trascinava; non sarebbero mai riusciti a muovere il ROV nella corrente delle acque del Vajont.
Ero molto affranto, volevo abbandonare il progetto ma tenetti duro, la curiosità riguardo alla presa sommersa mi teneva sveglio troppe ore nella notte. Così decisi di ricominciare, in maniera più seria, progettando un nuovo ROV a tavolino, progetto che soprannominai ROV phase II.
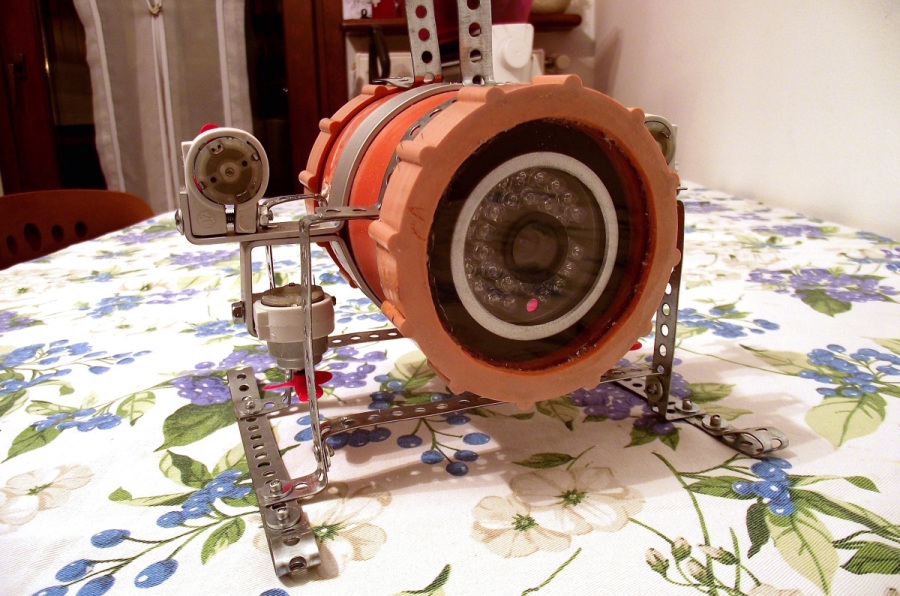
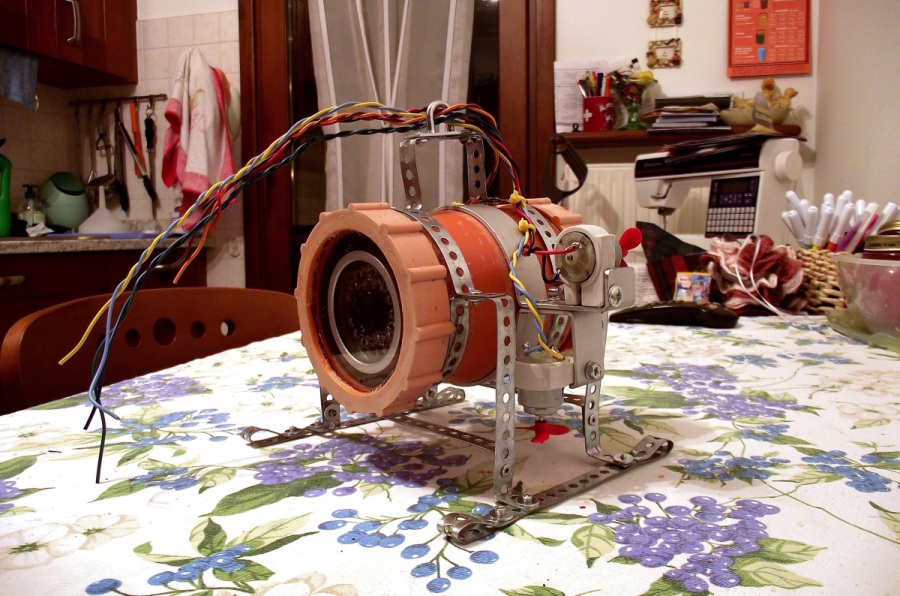
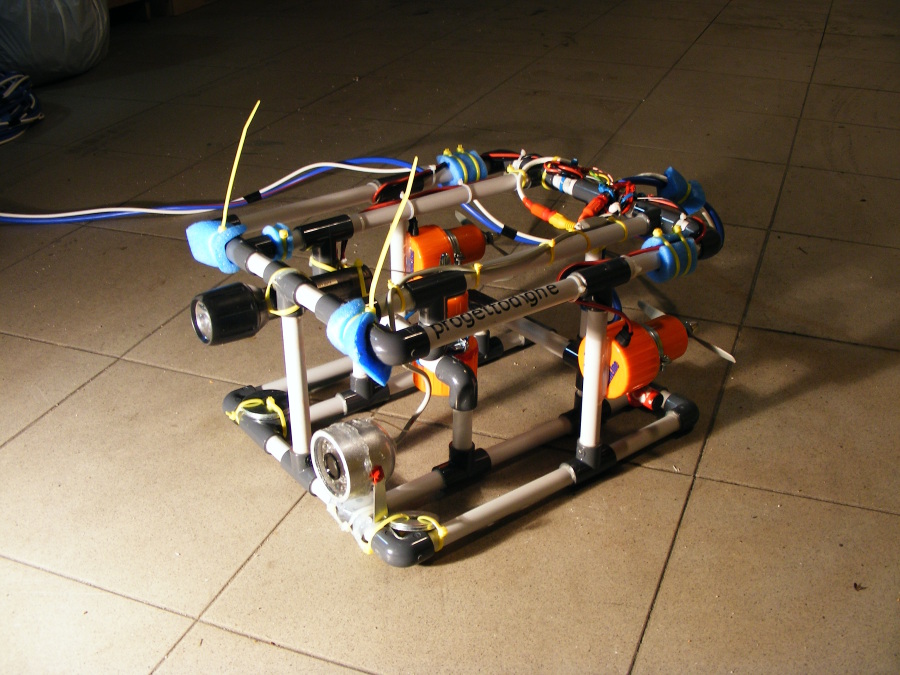
Il ROV phase II iniziò a prendere forma agli inizi di dicembre 2010, naturalmente nel garage di casa e naturalmente dopo cena fino ad ore tarde. Ho dei grandi bei ricordi di questo lavoro sebbene il periodo era molto delicato in famiglia: mia moglie era in attesa della nostra seconda bimba e la gravidanza non fu delle più facili. Feci un progetto vero e proprio in AutoCad che poi stampai in scala reale ed appesi sul muro del garage: il ROV phase II prevedeva una struttura stagna in tubo e raccordi in PVC da 16 mm di diametro, 3 thruster (due direzionali ed uno per il livellamento), la minicam IR resa stagna ed un illuminatore a LED subacqueo. Iniziai della piccola videocamera utilizzata nel primo ROV: la smontai e la sigillai con resina poliestere e silicone. La struttura la ottenni con un bel pò di metri di tubo in PVC incollato a curve e T mediante il solito collante specifico Tangit. Per i motori ebbi fortuna: una volta identificato ciò che poteva fare al mio caso andai in un negozio di nautica di San Giorgio di Nogaro e vuoi per i saldi vuoi per un errore della commessa in cassa, portai a casa 3 pompe di sentina a 12 volts ad un prezzo ridicolo! Le 3 pompe le trasformai in motori reversibili rimuovendone girante e voluta. Acquistai in un negozio di modellismo di Milano 3 eliche per aereomodello e 3 mozzi portaelica in alluminio; adattando un pò con il solito fidato Dremel montai le eliche sugli alberi delle pompe di sentina.



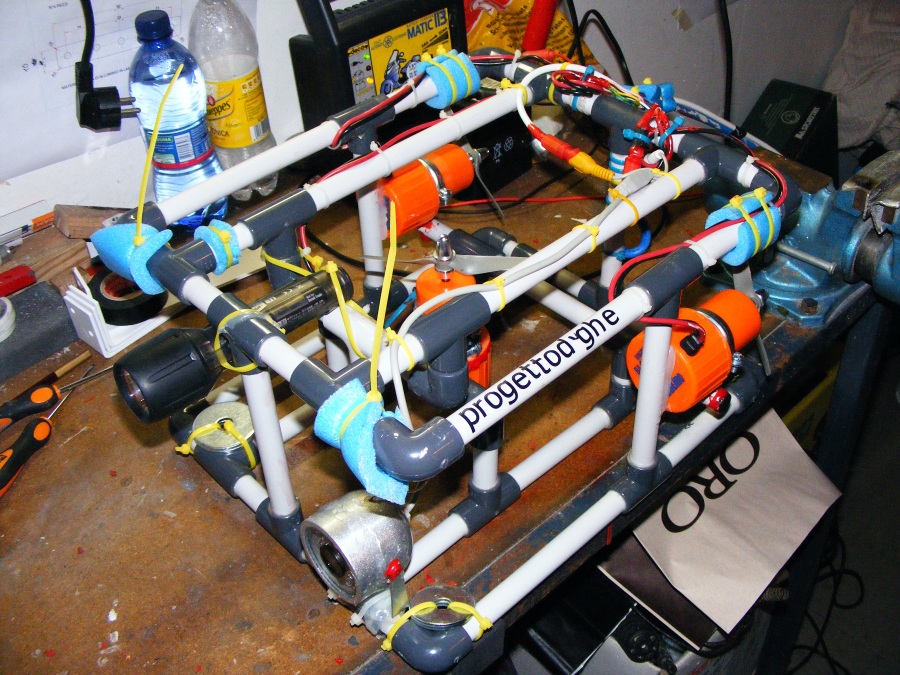
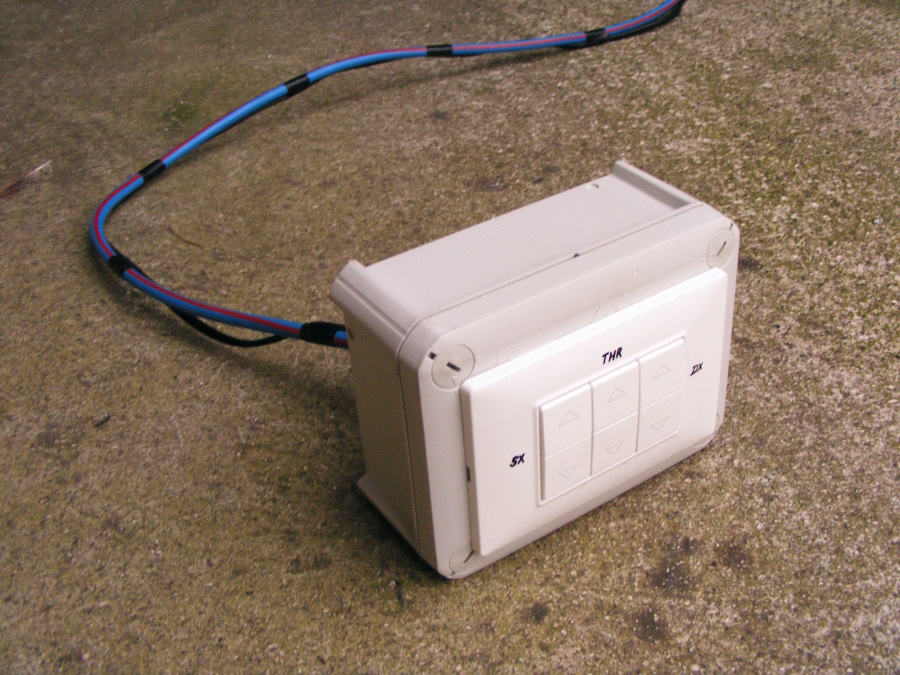
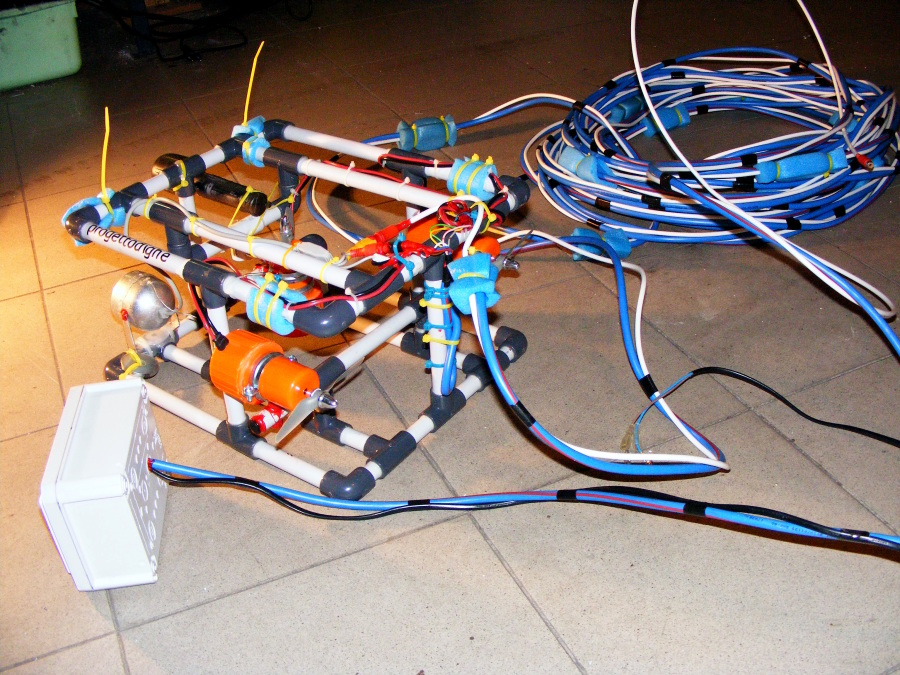
Acquistai una trentina di metri di cavo ad 8 poli che usai come linea di alimentazione per i motori (precisamente 6 degli 8 conduttori) e per l'alimentazione della videocamera; il segnale in uscita dalla videocamera veniva convogliato alla telecamera JVC (con funzione monitor e registrazione) tramite cavo AV da 75 ohm. Sul ROV montai anche una torcia subacquea a LED come illuminatore supplementare, nel caso i soli infrarossi non avessero garantito una sufficiente illuminazione sott'acqua. Realizzai quindi una nuova pulsantiera di controllo e tutti i cablaggi del caso. Come alimentazione del ROV utilizzai dapprima un'accumulatore da 12 volts e 5 Ah, poi scoprii che l'autonomia era limitata per la durata della missione e così ne aggiunsi un'altra uguale in parallelo. Una volta completato il tutto mi dedicai alle prove di bilanciamento idrostatico inserendo zavorre (rosette in acciaio zincato) in taluni punti e parti di profili PE espanso in altre zone. Il ROV era perfetto! Realizzai prove notturne per testare il funzionamento della telecamera con la torcia subacquea spenta ed accesa. Qualche ripresa nel video sottostante:
Qualche immagine del ROV a fine lavori; in realtà non ho scattato molte foto perchè mi ero posto come obiettivo il mese di marzo 2011 per la missione al lago del Vajont, e mi sono ritrovato con il tempo libero molto limitato da inizio gennaio fino a febbraio inoltrato, quindi ho preferito concentrarmi sul lavoro trascurando i dettagli.
IL ROV AL VAJONT
La missione d'eplorazione sul fondo del lago del Vajont è stata un successo! Grande soddisfazione nel capire cosa vi fosse sott'acqua in corrispondenza della originaria presa di by-pass, bella ed indimenticabile esperienza che ha visto coinvolti anche gli amici ed 'aiutanti' Elvis ed Alessandro. Ora voglio lasciare parlare le immagini, sceneggiate e dirette ad hoc da Elvis in un film!
La locandina:
Il trailer:
Il film (parte 1):
Il film (parte 2):
Il film (parte 3):
DATI TECNICI E CARATTERISTICHE
Struttura: tubo e raccordi in PVC da 16 mm di diametro (7 metri tubo, n°12 curve 90°, n°22 T)
Zavorre: rosette in acciaio zincato varie
Galleggianti: profili in PE espanso per imballaggio
Motori/thrusters: n° 3 pompe di sentina RULE 12v CC 3A modificate con mozzo in alluminio ed elica bipala APC 4,5x4,1 in resina rinforzata fiberglass
Camera: LYD 802C, a colori con infrarossi, 380TV lines, illuminazione minima 3 LUX, alimentazione 9-12v CC
Illuminazione supplementare: torcia subacquea Rexer a 4 led, alimentazione 6v CC
Pulsantiera di comando: n°3 interuttori bipolari a 3 posizioni
Cavo ombelicale alimentazione: 30 metri di cavo a 8 conduttori
Cavo ombelicale segnale: 30 metri di cavo AV a 75 ohm
Alimentazione: n°2 accumulatori 12 v-5Ah collegati in parallelo
Autonomia min: 1,5 ore
Collaudato a:
- profondità massima = 11 metri
- pressione massima = 1 bar
Sistema di registrazione/monitor: telecamera JVC miniDV, treppiede Made in China
Materiali vari: collante Tangit per PVC, sigillante dielettrico per nautica, fascette in nylon, silicone acetico, sticker "progettodighe"
Tempo di costruzione: 95 ore
![]()
![]()